
Jedes Jahr ein bisschen besser
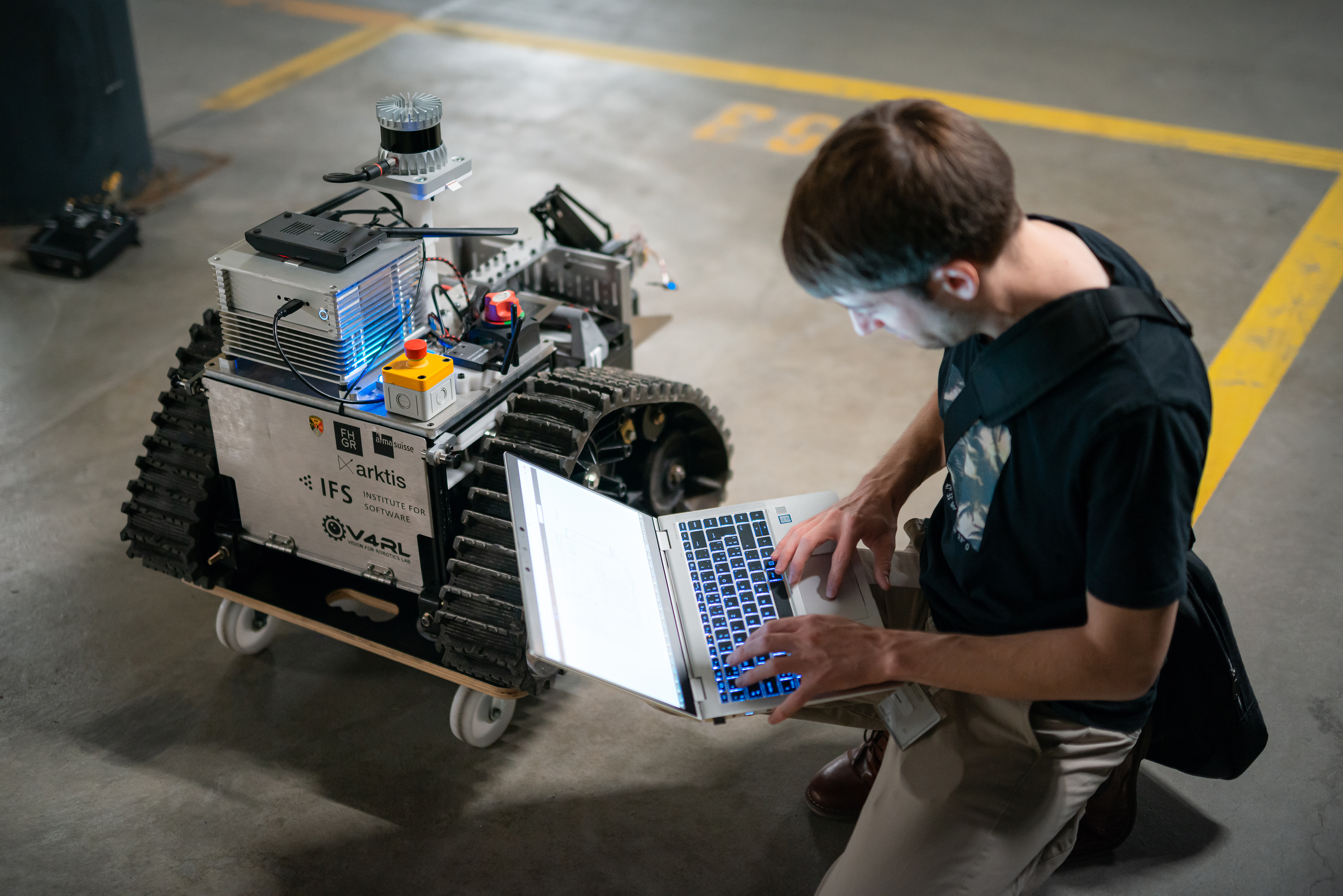
«BoarAI» ist ein Roboter, der sich mittels Raupen im Gelände fortbewegen kann. Gedacht zur Messung von Radioaktivität, chemischer Belastung und weiteren Umweltwerten, ist das von Armasuisse finanzierte Projekt seit mehreren Jahren an der FH Graubünden in kontinuierlicher Entwicklung.
Text: Ulrich Hauser-Ehninger / Bild: FH Graubünden / Videos: FH Graubünden, TV Südostschweiz
Als Christian Bermes als Dozent im Bereich Mobile Robotics an die FH Graubünden kam, brachte er das Projekt «BoarAI» in Form eines Landroboters (Unmanned Ground Vehicle, UGV) mit. In seinen Grundzügen beinhaltete dieses Projekt bereits die Richtung, in die auch die Entwicklung des heutigen Forschungsteams geht. Entwickelt mit dem Fokus, hilflose Personen aus Gebieten zu bergen, in die man wegen des Gefahrenpotenzials kein Rettungspersonal schicken kann, soll sich der Roboter «BoarAI» mittels unterschiedlicher mechanischer Andockteile an der zu rettenden Person ankoppeln und sie aus dem Gefahrenbereich ziehen. Alternativ kann das System mit einem 3D-Strahlungssensor zur Messung von Radioaktivität erweitert werden.
Video: Der «BoarAI» im Einsatz
Die intelligente «Wildsau»
Das wegen seines (aus dem Englischen stammenden) Namens «Boar» an der FH Graubünden liebevoll «Wildsau» genannte System wurde kontinuierlich weiterentwickelt. Nach Verbesserungen bei der Fernsteuerung, der Präzision der Steuerung und der Zuverlässigkeit begann der Einstieg in die Autonomie des Fahrzeugs. Hierfür wurde deutlich mehr Rechenpower nötig, die im doch recht beschränkten Innenraum allerdings keinen Platz mehr fand. Da immer mehr zusätzliches Material auf dem «Dach» der Maschine Platz finden musste, fiel im Sommer 2022 die Entscheidung, ein neues Fahrzeug mit mehr Stauraum zu bauen. Das Forschungsteam konnte einige spezielle Modifikationen ohne Aufpreis vornehmen – der Roboter bietet nun deutlich mehr Platz im Innenraum.
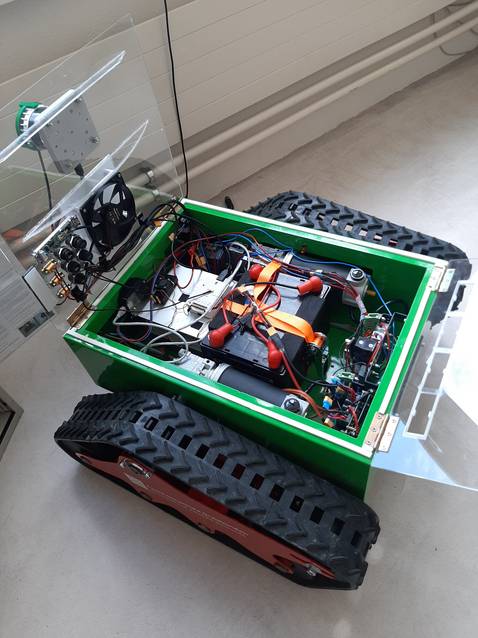
Komplexes Innenleben: Da der Roboter «BoarAI» immer autonomer werden soll, wurde er 2022 vollständig neu entworfen und gebaut.
Der Ausbau des Roboters gestaltete sich recht aufwändig. In seinem Inneren sind viele verschiedene Komponenten verbaut, die mit unterschiedlichsten Versorgungsspannungen zu speisen sind: 24 Volt für die Motoren mit Steuerung und das LIDAR (ein Gerät, das die Umgebung dreidimensional abtasten kann), 19 Volt für den Industrie-Computer, 12 Volt für verschiedene Kleinkomponenten sowie 5 Volt für einen Raspberry Pi, der unter anderem die Steuerung des Fahrzeugs übernimmt. Unterschiedliche Komponenten müssen über ein drahtgebundenes Netzwerk miteinander kommunizieren. Hinzu kommt eine WiFi-Verbindung, damit bei der Entwicklung nicht ständig auf das Innere der Maschine zugegriffen werden muss. Alles in allem wird es also doch wieder recht eng im Bauch der «Wildsau».
Da es bei der letztjährigen Durchführung der «Advanced Robotic Capabilities for Hazardous Environments» (Arche), der jährlichen Integrationswoche von Armasuisse, zum Teil über 38 Grad warm war, wurde das Nicht-Überhitzen der Gerätschaften zur Herausforderung. Um das Risiko zu reduzieren, hat das Forschungsteam nun zwar keine aktive Kühlung, aber immerhin eine Zwangsbelüftung eingebaut.
Kartierung als Herausforderung
Im Zuge der vollständig neuen Hardware erfolgte auch die Entscheidung, für die Steuerung und Navigation ein anderes System zu verwenden als für die 3D-Kartierung und die Pfadplanung. Denn die Steuerung benötigt nicht die Rechenpower, die der Industrie-Computer zur Verfügung stellt, muss aber dauernd und schnell reagieren können. Die Kartierung im dreidimensionalen Raum wiederum beinhaltet grosse Datenmengen, die geordnet, ausgedünnt, zueinander in Relation gesetzt und ausgewertet werden müssen, um ein Abbild der Umgebung zu erstellen, mithilfe dessen der Roboter einen Pfad zum Ziel suchen kann. Dieser Meilenstein wurde bis zur diesjährigen Arche nicht erreicht, doch es konnten Zwischenergebnisse gezeigt werden. Bis zur Erreichung dieses Zwischenziels gibt es noch einiges zu tun.
Es gibt fertige Systemsoftware zur Steuerung mobiler Roboter, beispielsweise Ardupilot, mit dem schon einige Erfahrungen im Copter-Bereich und mit Tragflächenflugzeugen gesammelt worden sind. Daraus könnte man schliessen, dass sich solch ein System schnell implementieren lässt. Aber weit gefehlt: In fliegenden Robotern sorgt ein Magnetometer dafür, dass der Roboter weiss, in welche Richtung er ausgerichtet ist. «BoarAI» ist eine Blechkiste und beinhaltet eine ganze Menge Metall. Ein Magnetometer würde hier also schlichtweg «streiken» und nur noch Datenmüll liefern. Aber was passiert, wenn man den Roboter, der GPS an Bord hat, einfach vorwärtsfahren lässt? Dann kann er bestimmen, in welche Richtung er fährt und auch, in welche Richtung er schaut. Man müsste aber ziemlich weit fahren, um bei den rund 1,5 Metern Genauigkeit des GPS eine präzise Richtung zu bekommen. So hat das Forschungsteam im Frühjahr 2024 Erfahrung mit einem sogenannten RTK-GPS gesammelt. Das erlaubt Genauigkeiten im Zentimeterbereich. Damit weiss der Roboter schon nach einer kurzen Strecke ziemlich genau, in welche Richtung es geht.
Mit dieser Steuerungssoftware kann «BoarAI» autonom sogenannte Missionen erfüllen und geplante Routen und Muster anhand von GPS-Daten absolvieren. Die Fahrdaten und die erfassten Messdaten können reibungslos in Echtzeit in die Daten anderer Fahr- bzw. Flugzeuge eingebettet werden, sodass im Schwarm Messungen durchgeführt werden können. «BoarAI» achtet jedoch nicht auf Hindernisse oder Geländeelemente, die nicht befahrbar sind. Die Vermeidung von Hindernissen ist deshalb der nächste Entwicklungsschritt, gefolgt von einer Pfadplanung. Der nächste Meilenstein soll sein, dass die Missionssoftware ein neues Ziel kommuniziert und die «Wildsau» den Weg zu diesem Ziel selbst sucht und findet. So wird «BoarAI» jedes Jahr ein bisschen schlauer und kann anlässlich der nächsten Armasuisse-Woche seine neuen Fähigkeiten zur Schau stellen – und damit einen nächsten Schritt in Richtung «erfolgreiche Rettung aus einer Gefahrenzone» machen.
{kind=link}
Beitrag von
Prof. Dr. Ulrich Hauser-Ehninger, Dozent, Institut für Photonics und Robotics