
Projekt auf einen Blick
Entwicklung eines unbemannten Wasserfahrzeugs (unmanned surface vessel, kurz USV) zur Erstellung von georeferenzierten Orthofotos des Gewässergrundes in ufernahen Bereichen. Aktueller Hintergrund ist die Unterstützung von Fachleuten, z. B. Biologinnen und Biologen, beim Screening und Monitoring von Wasserpflanzen.
Projekt
Wasserfahrzeug fürs Unterwasser-MonitoringProjektleitung
Schlegel Manuel Mehr über Schlegel ManuelBeteiligte
Institut für Photonics und Robotics (FHGR)
Amt für Natur und Umwelt (Kanton Graubünden)
Studierendengruppe Projektarbeit Wasserrobotik (Luca Bargetzi, Florian Büttiker, Tim Germann, Yannick Kohler)Team
Bermes Christian Mehr über Bermes Christian Derungs Robin Mehr über Derungs RobinForschungsfelder
Institut für Photonics und Robotics (IPR) Mehr über Institut für Photonics und Robotics (IPR)Auftrag/Finanzierung
Förderverein der Fachhochschule GraubündenDauer
Mai 2024 - März 2025
Ausgangslage
Orthofotos der Erdoberfläche stehen heute grossflächig zur Verfügung und werden z. B. für die Kartierung und Vermessung eingesetzt. Orthofotos des Gewässergrundes im Uferbereich wären für Fachleute ebenfalls sehr nützlich, insbesondere für das Screening und Langzeitmonitoring von trittempfindlichen Wasserpflanzen. Derzeit werden solche Arbeiten oft manuell – watend oder vom Stand-Up-Paddle-Board (SUP) aus – durchgeführt, was ein umfassendes, aussagekräftiges und vergleichbares Monitoring erschwert.
Projektziel
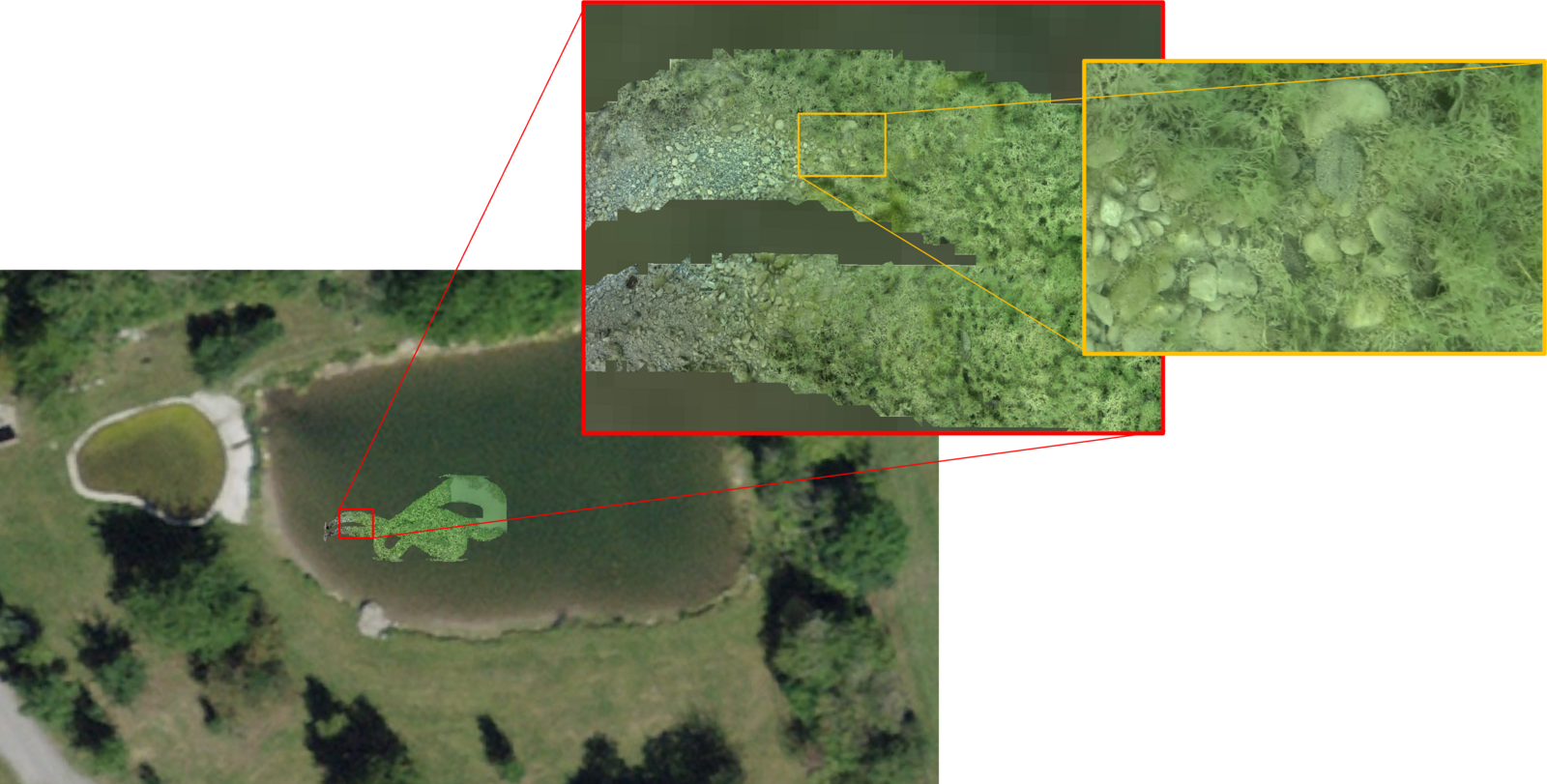
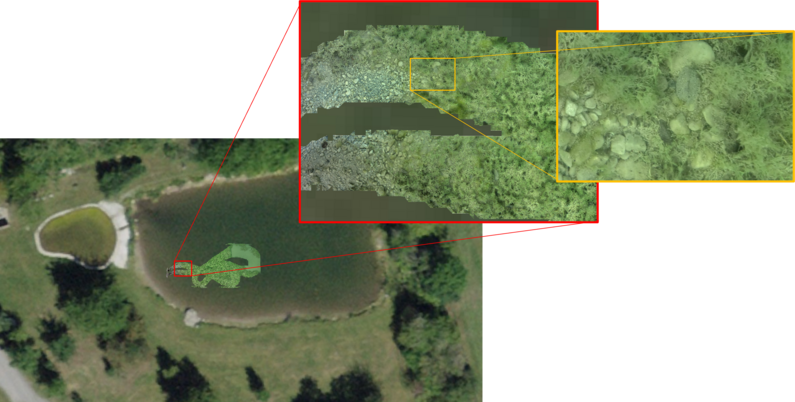
Um Fachleute beim Screening und Monitoring von ufernahen Wasserpflanzen zu unterstützen, soll ein Prototyp eines Systems zur Erstellung von georeferenzierten Orthofotos dieser Uferbereiche entwickelt werden. Dieses System umfasst ein unbemanntes Wasserfahrzeug (USV) zur Erfassung der Bilddaten sowie den anschliessenden Prozess zur Sensordatenfusion und Erstellung des Orthofotos.
Durch die Integration des fertigen Orthofotos in ein GIS-Anwendungsprogramm wird das Screening und Monitoring von Wasserpflanzen vereinfacht. Zusätzlich können auch andere Anwendungsfälle, z. B. das Auffinden von Abfall oder invasiven Neophyten, unterstützt werden.
Resultat
Basierend auf der Projektarbeit einer Studierendengruppe wurde ein Prototyp eines USV mit zwei integrierten Farbkameras und einem hochpräzisen RTK-GPS entwickelt. Um Schlammaufwirbelungen am Gewässergrund zu vermeiden, wird das USV mit einem vektorgesteuerten Propeller in der Luft angetrieben und manövriert. Neben dem ferngesteuerten manuellen Betrieb kann der Prototyp auch autonom Missionen abfahren. Dazu wurde käufliche Control-Hardware und -Software verwendet und für den spezifischen Anwendungsfall konfiguriert. Während die erste Kamera eine Live-Ansicht der Untergrundsituation mit reduzierter Qualität liefert, nimmt die zweite Kamera (GoPro HERO 11) hochauflösende Bilder auf. Anschliessend werden die Bilder mithilfe des Tools GyroFlow zusätzlich stabilisiert und die RTK-GPS- und Bilddaten miteinander synchronisiert. Mit dem Open-Source Toolkit OpenDroneMap wird aus den Einzelbildern schliesslich ein zusammenhängendes, georeferenziertes Orthofoto der Situation erstellt.




Team



Weiterführende Information
Beteiligte
Zusätzlich zu den Mitarbeitenden der FH Graubünden haben sich folgende Personen am Projekt beteiligt:
- Amt für Natur und Umwelt (Kanton Graubünden, Marylaure de la Harpe)
- Studierendengruppe Projektarbeit Wasserrobotik
- Luca Bargetzi
- Florian Büttiker
- Tim Germann
- Yannick Kohler
- Marco Ruggia (ehemaliger Mitarbeitender)