
Projekt auf einen Blick
Das Projekt hat das Ziel, existierende smarte Strassenlaternen mit zusätzlicher Sensorik auszustatten. Diese Sensorik soll nicht nur Objekte detektieren können, sondern auch den Objekttyp (Fahrzeug, Person, Tier, Fahrrad usw.), sowie die Bewegungsrichtung und ‑geschwindigkeit liefern. Dies ermöglicht es, Strassenlaternen noch intelligenter zu dimmen und zu schalten. Zusätzlich wird eine intelligente Verkehrsüberwachung angestrebt, z. B. um freie Parkflächen zu detektieren.
Projekt
Objekterkennung an StrassenlaternenLead
Institut für Photonics und Robotics (IPR) Mehr über Institut für Photonics und Robotics (IPR)Projektleitung
Catregn Gion-Pol Mehr über Catregn Gion-PolBeteiligte
IPR Institut für Photonics und RoboticsTeam
Schüssler Jan Mehr über Schüssler Jan Roebrock Philipp Mehr über Roebrock PhilippForschungsfelder
Bildverarbeitung Mehr über Bildverarbeitung Optoelektronik Mehr über Optoelektronik
Ausgangslage
Aktuell sind viele Strassenlampen bereits auf LED umgestellt. Diese Strassenlampen sind oft über ein Funknetz miteinander verbunden und besitzen einen Beleuchtungskontroller, über welchen das Leuchtmittel gedimmt und geschaltet werden kann. Einige der Strassenlaternen sind mit Passiv-Infrarot(PIR)-Sensoren ausgestattet, welche die Präsenz von Objekten unter der Lampe detektieren können. Durch das dichte Netz und die Höhe (9–12 m) sind Strassenlaternen für die Integration weiterer Sensorik prädestiniert.
Projektziel
Ziel dieses Projektes ist es, eine Strassenlaterne mit weiterer Sensorik auszustatten. Dabei gilt es zunächst herauszufinden, welche Technologie für eine Objektdetektion und ‑klassifizierung geeignet ist. In Frage kommen Time-Of-Flight, LIDAR, RADAR oder reguläre 2D-Kameras. Ist die richtige Technologie oder eine Kombination davon bestimmt, soll in einem nächsten Schritt ein Prototyp einer Sensoreinheit für die Montage an der Strassenlaterne entwickelt werden. Damit die Anonymität des Objektes jederzeit gewährleistet ist, findet die Auswertung der Bilder auf der Sensoreinheit statt. Eine Evaluationsphase des Prototyps an einer Strassenlampe im Alltagsbetrieb bildet den Abschluss dieses Projekts.
Umsetzung
In einem erweiterten Testaufbau (Vormessungen wurden bereits durchgeführt) sollen die verschiedenen Technologien evaluiert werden. Dabei sollen auch Umwelteinflüsse wie Sonnenschein, Nebel, Regen oder Schnee mitberücksichtigt werden. Neben der Performance ist es auch wichtig, eine kostenoptimierte Lösung zu finden. Die Entwicklung des Prototyps umfasst Sensorik, Beleuchtung, Elektronik, Gehäuse sowie eine Embedded Plattform. Der Prototyp wird während der Evaluationsphase an eine Strassenlaterne in Chur montiert.
Resultate
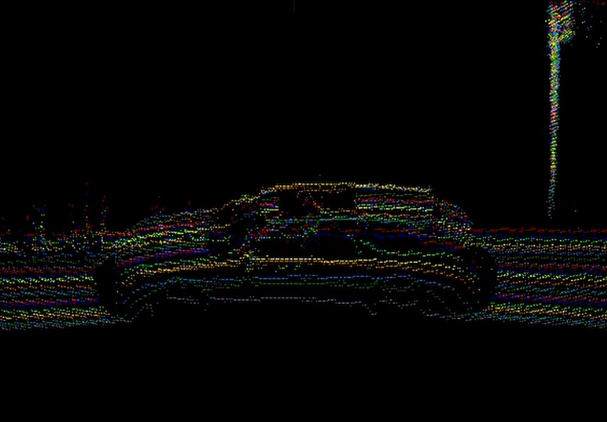
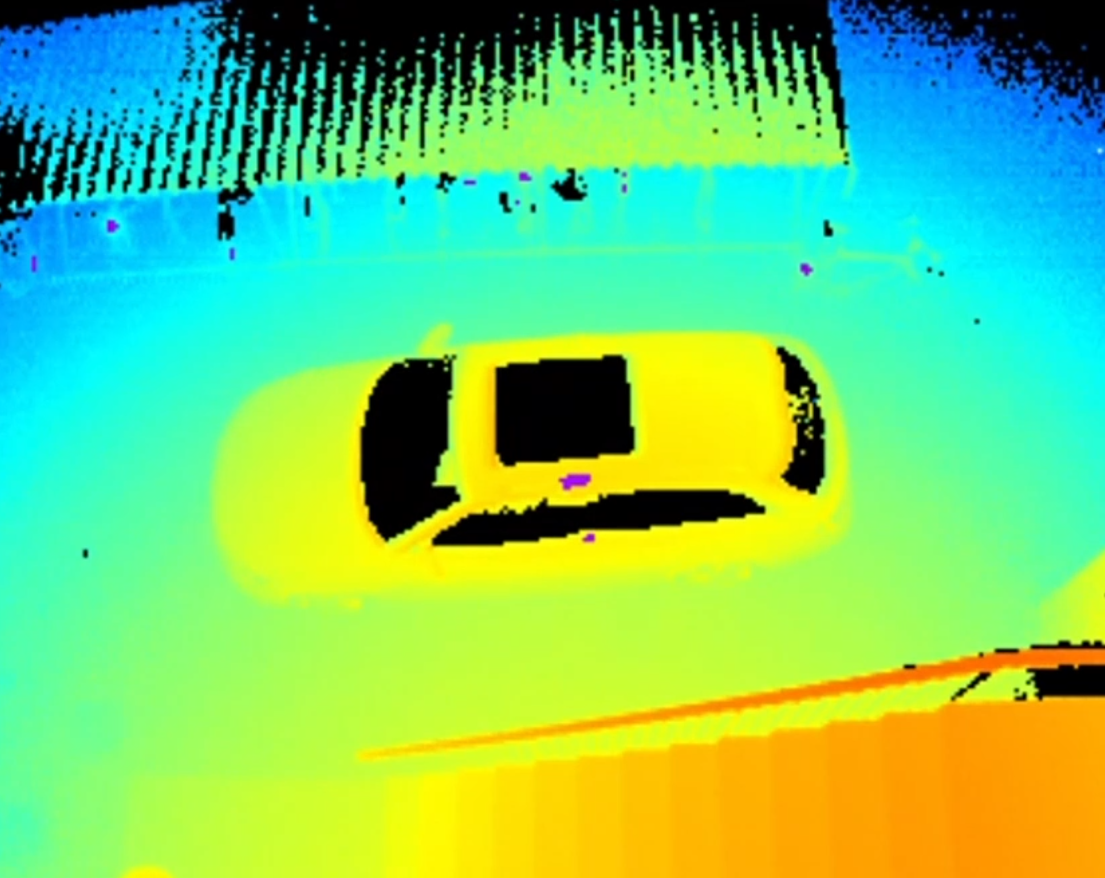
In einem Vorprojekt konnten bereits erste Messungen mit einigen Technologien gemacht werden. Dabei konnte gezeigt werden, dass Objekte prinzipiell erkannt und klassifiziert werden können. Mit den Ergebnissen dieses Vorprojekts konnte ein grösseres Innosuisse Projekt akquiriert werden. Dieses finanziert die vertiefenden Arbeiten im Rahmen dieses spannenden Projektvorhabens.
Smarte Strassenlaternen mit Objekt-Detektion und Analysefähigkeiten


Team



Weiterführende Information
Forschungsfelder
Beteiligte